


发布日期:2025-06-03
信息来源:计算机与信息技术学院
5月23日,2025年IEEE国际机器人与自动化会议(ICRA 2025)在美国闭幕。我校大数据科学与产业研究院团队与华南理工大学、利物浦大学联合提出的具有遮挡感知的6D位姿估计新方法,研究成果《Occlusion-aware 6D Pose Estimation with Depth-guided Graph Encoding and Cross-semantic Fusion for Robotic Grasping》入围Best Paper Finalist。
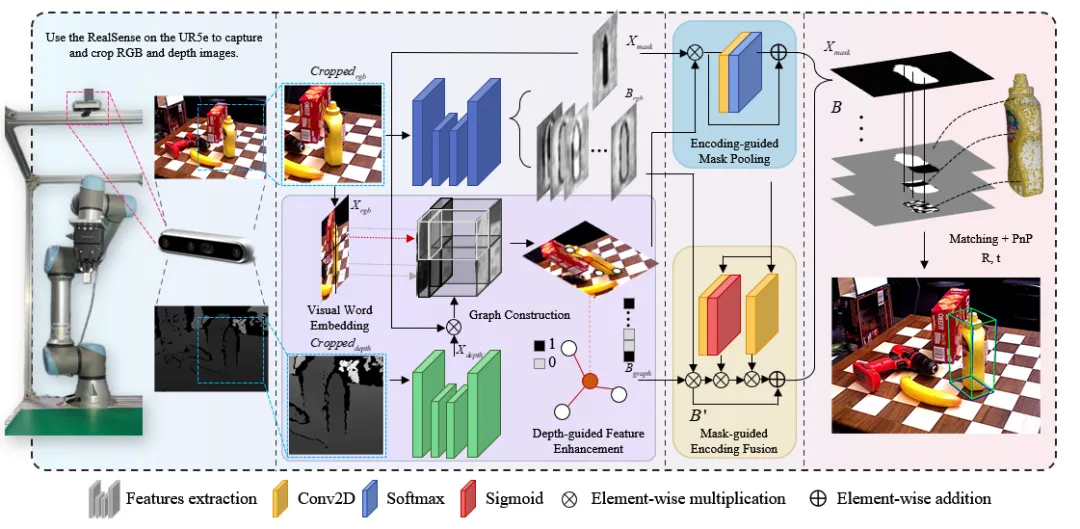
精确的6D位姿估计对机器人抓取任务至关重要,然而在遮挡环境下常常面临参数预测不准确及复杂表面点关系建模不足的问题。为此,该研究提出了一种新颖的遮挡感知6D位姿估计框架,通过引入基于深度引导的图神经网络(GNN),从RGBD输入中构建物体表面点之间的潜在关系。同时,利用物体掩码和二值编码两种语义信息的自适应融合,提取出高效的2D-3D对应特征,从而增强了位姿估计在遮挡场景下的鲁棒性。大量实验结果显示,该方法在LMO和YCBV数据集上相较于传统方法分别提升了1.2%和1.9%(部分物体提升高达30%),并在真实场景测试中取得了令人满意的效果。所提方法在真实与虚拟环境中均展现出良好的泛化能力,有望在机器人抓取、人机交互等任务中发挥重要作用。
论文共同一作为刘京阳(山西大学大数据科学与产业研究院硕士生)、鹿振宇(华南理工大学自动化科学与工程学院教授),合作者为杨静(山西大学自动化与软件学院助理教授)、Chenguang Yang(利物浦大学教授, IEEE Fellow),通讯作者为陈路(山西大学大数据科学与产业研究院副教授,博导)。
据悉,ICRA是机器人领域最具影响力和权威性的国际学术会议之一,是机器人领域规模(千人以上)和影响力均排名第一的顶级国际会议。ICRA由IEEE机器人与自动化学会(IEEE Robotics and Automation Society, RAS)主办,每年举办一次,汇集了全球顶尖的机器人研究者、工程师和产业界人士,展示和讨论机器人技术、自动化系统及相关领域的最新研究成果和技术进展。本次 ICRA 2025共收到全球4000多篇论文投稿,吸引7000余名参会者。大会公布的Best Paper奖项共设12项,每项奖项的入围论文通常仅3篇,最终从中遴选出一篇最佳论文,评选出的最佳论文通常代表着前沿技术与重大突破。
责编 | 瑄 瑄
二审 | 范艳华
三审 | 张 捷
下一篇:山大前辈兰承荣与今日大同校区
